WebTactix
Method
Task Preprocessing
A constraint agent converts a user request into explicit constraints
C={c1,c2,...,cm}, each describing a factual requirement (e.g., range, quantity, or format), so progress and stopping conditions
can be checked more clearly.
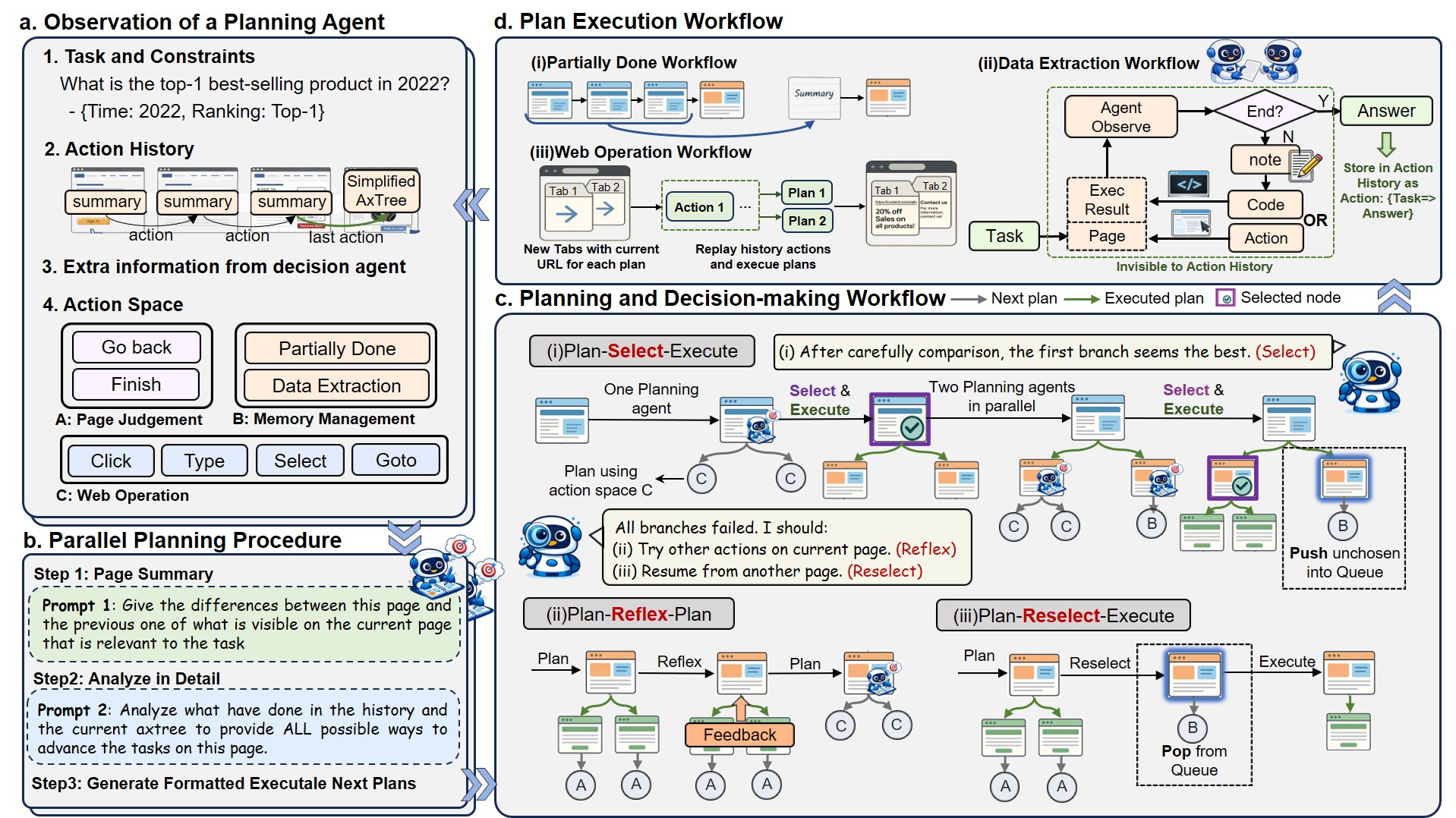
Simplified Observation
WebTactix converts the raw accessibility tree into a text-based AxTree with unique indices for interactive elements, then simplifies it:
- Cross-page deduplication: after navigation, keep only newly introduced interactive elements to reduce redundant content.
- Structure-aware rewriting: compress repetitive structures (tables, comments, product lists) by keeping headers and the first
kitems; remaining items can be retrieved during Data Extraction.
Semantic Tree Memory
WebTactix maintains a semantic tree G=(V,E). Each node represents a visited webpage state.
Each directed edge corresponds to an executable plan proposed by a planning agent. After execution, the resulting pages become new nodes,
and their fact-based summaries are stored to guide future branch selection.
Parallel Planning
At each step, WebTactix expands multiple candidate actions from the current page in parallel. A planning agent assigned to each resulting page produces (i) a fact-based page summary and (ii) multiple executable next-step plans grounded to AxTree indices. Plans are generated from a high-level action space:
- Page judgement (e.g., decide whether to
go_back). - Memory management (e.g., Partially Done, Data Extraction).
- Web operation (click/input/select grounded to AxTree indices).
Fact-based Decision + Recovery
A decision agent compares candidate nodes using their grounded summaries and outgoing plans, then chooses the next branch. When needed, it can (i) generate a short reflection to re-plan on the same state (Reflex), or (ii) reselect a previously unchosen node from a global queue (Reselect) to continue exploration without restarting search.
Plan Execution
- Partially Done: compress completed steps and confirmed facts into a concise summary to reduce long-history interference.
- Data Extraction: iteratively interact with the page (optionally using Python for data processing) to return a structured task result, recorded as a single action.
- Parallel tabs: execute multiple plans for the selected node in parallel tabs by replaying required history to reach the corresponding state, then recording outcomes back into the semantic tree.
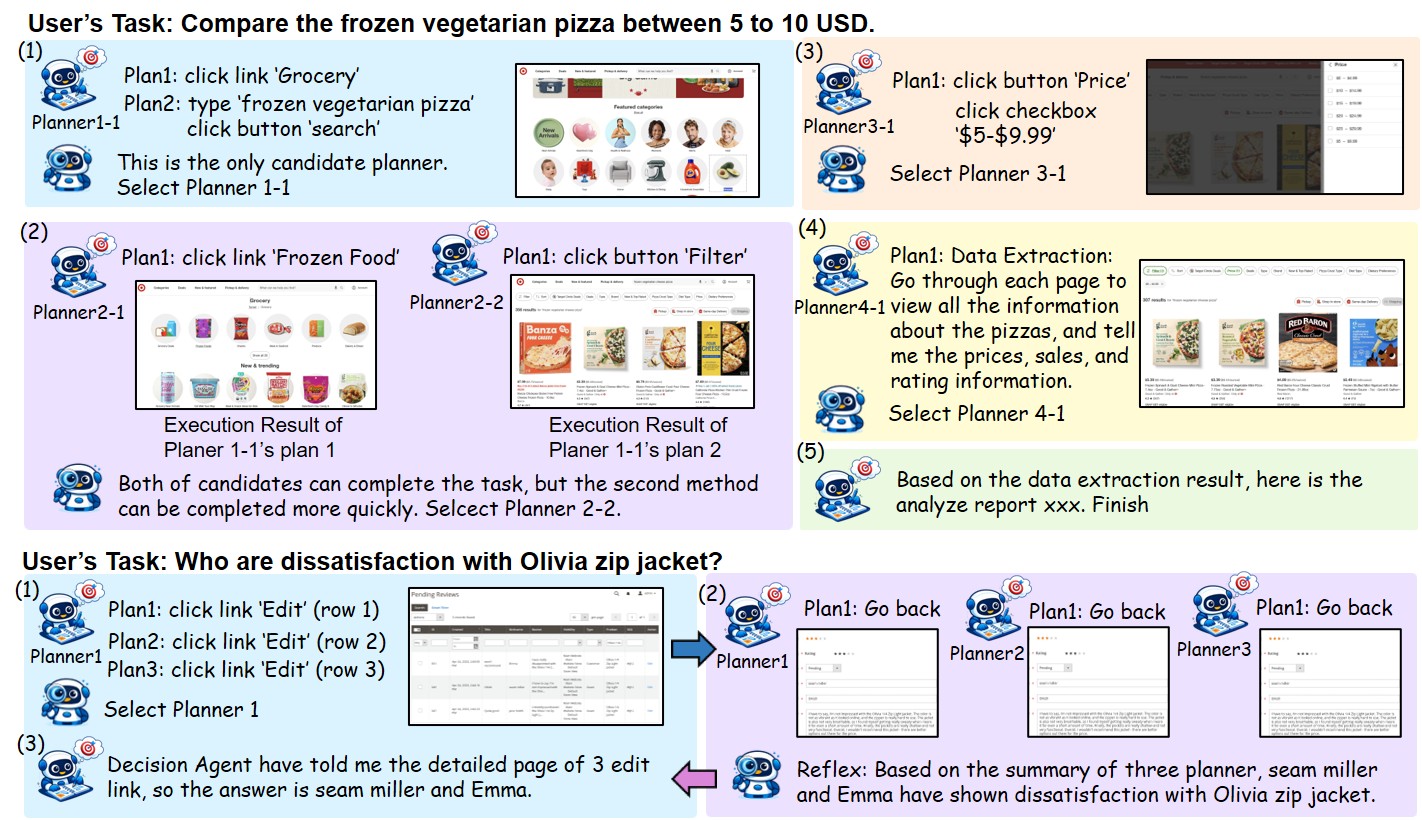
Case Study
The paper presents two examples illustrating how WebTactix solves real web tasks through parallel exploration and semantic-tree-guided selection: a shopping product comparison task and a review inspection task where parallel exploration and Reflex summarize facts across branches.
Results
Leaderboard: https://docs.google.com/spreadsheets/d/1M801lEpBbKSNwP-vDBkC_pF7LdyGU1f_ufZb_NWNBZQ/edit?usp=sharing
| Site | Tasks | Correct | Fail | N/A | Success Rate (%) |
|---|---|---|---|---|---|
| SHOPPING_ADMIN | 182 | 143 | 38 | 1 | 79.01 |
| MAP | 109 | 79 | 30 | 0 | 72.48 |
| SHOPPING | 187 | 139 | 47 | 1 | 74.73 |
| 106 | 89 | 14 | 3 | 86.41 | |
| GITLAB | 180 | 118 | 54 | 8 | 68.60 |
| MULTISITE | 48 | 26 | 22 | 0 | 54.17 |
| TOTAL | 812 | 594 | 205 | 13 | 74.34 |